|
|
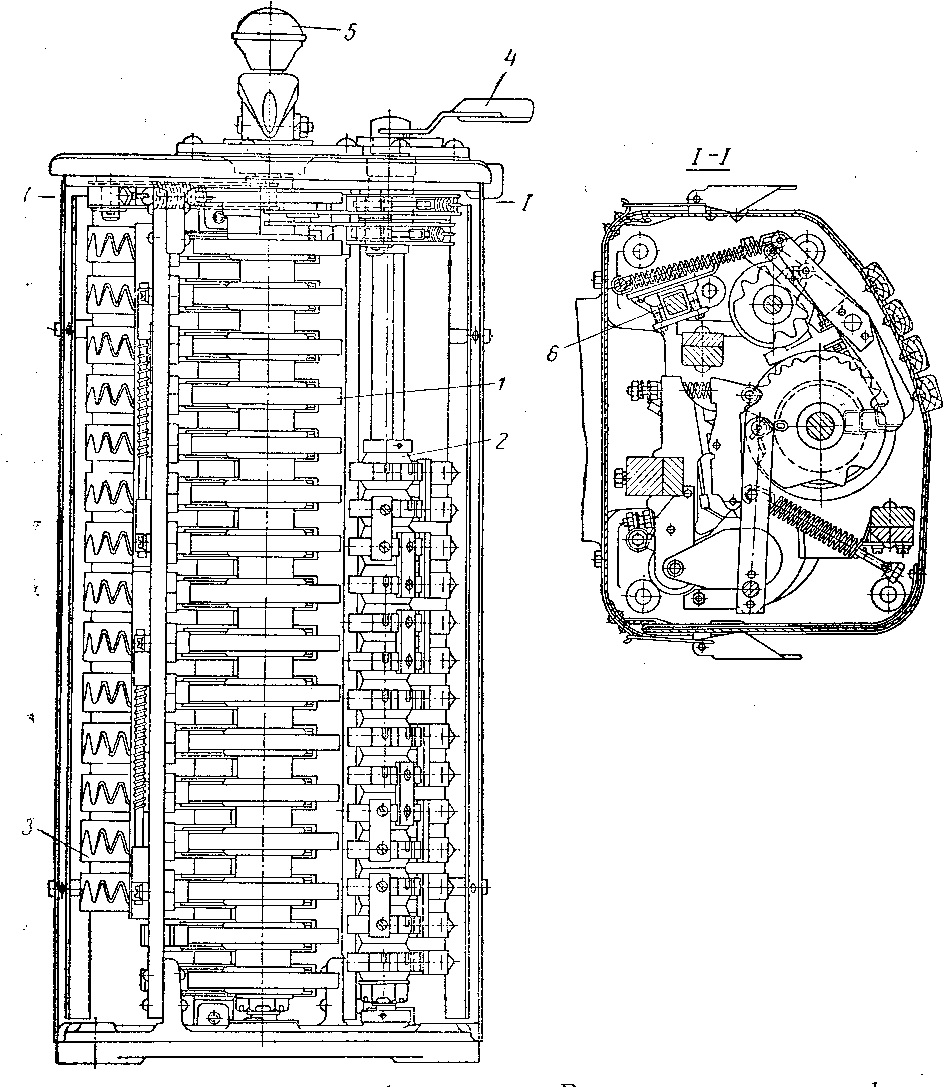
1 - главный барабан; 2 - реверсивный барабан; 3 - кулачковый элемент; 4 - реверсивная рукоятка; 5 - главная рукоятка; 6 - стойка с пальцами.
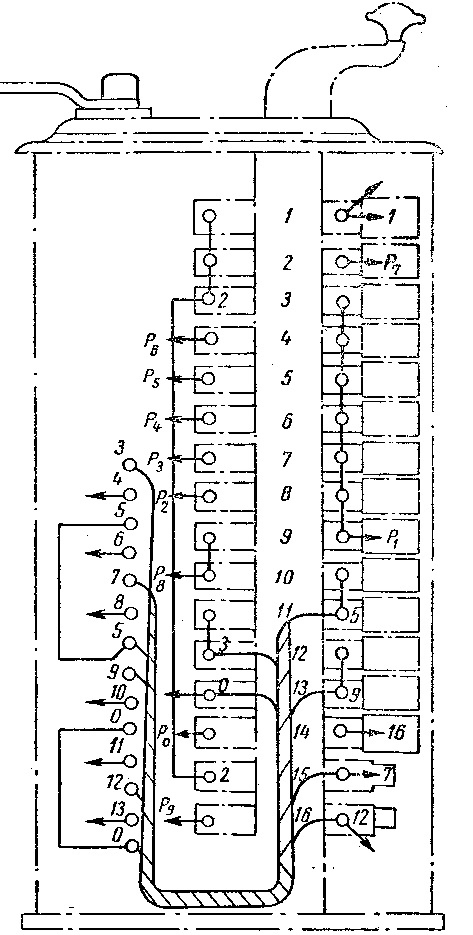
Контроллер МТ-30Г кулачково-барабанного типа. Он имеет два барабана: главный и реверсивный с пальцами.
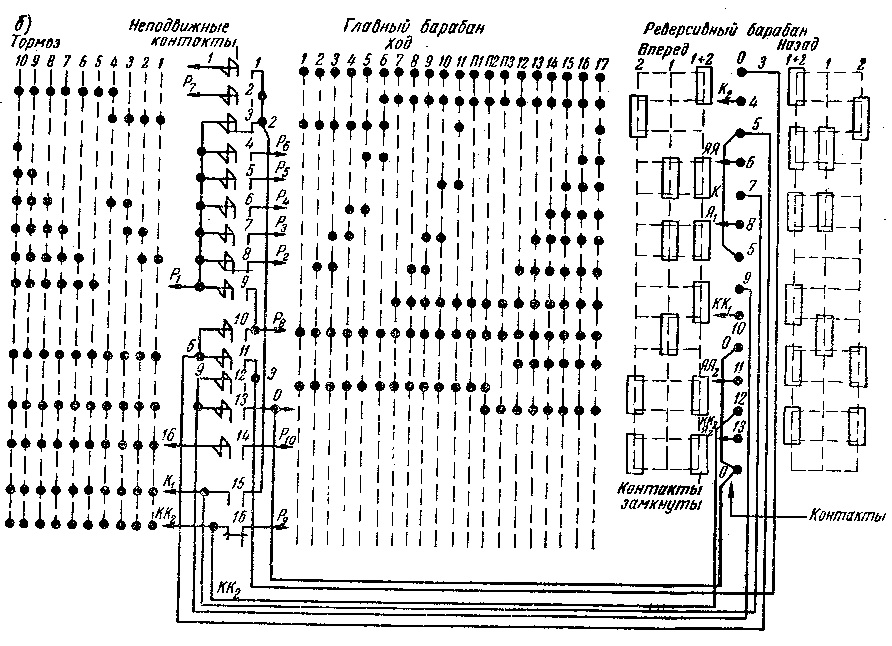
При помощи главного барабана происходит включение, выключение, пуск и переключение тяговых электродвигателей с последовательного соединения на параллельное и обратно, а также электродинамическое торможение. Отличительной особенностью этого контроллера является отсутствие фиксации пусковых позиций, что позволило почти вдвое увеличить количество позиций, сохранив основные размеры контроллера. Фиксации имеют следующие позиции: нулевая (выключенное положение), маневровая, ходовые при последовательном и параллельном соединении тяговых электродвигателей, а также все тормозные. В связи с этим изменяется характер движения главной рукоятки контроллера при пуске. Если на обычных контроллерах рукоятка задерживалась на некоторое время на каждой пусковой позиции, то у контроллера типа МТ-30Г она плавно передвигается с выключенного положения до ходовой позиции выбранного режима езды (при последовательном или параллельном соединении тяговых электродвигателей). Из-за большого количества позиции пуск при таком управлении получается плавным, без толчков. В зависимости от профиля пути и нагрузки поезда изменяется скорость перемещения рукоятки. Реверсивный барабан контроллера служит для изменения направления движения и отключения неисправного двигателя. Главный и реверсивный барабаны механически сблокированы между собой. Контроллер имеет 17 ходовых и 12 тормозных позиций. При переходе вала контроллера с нулевой позиции до 11-й происходит постепенно выведение пусковых реостатов при последовательно соединенных тяговых двигателях. 11-я позиция контроллера имеет фиксацию и является первой служебной ходовой позицией. Отсутствие фиксации промежуточных позиций позволяет управлять контроллером без особых усилий, равномерно и быстро (за время 2.5 с.) Переход с последовательного соединения двигателей на параллельное осуществляется по методу закорачивания одного тягового двигателя. При переводе вала контроллера с 12-й позиции до 16-й осуществляется постепенное уменьшение величины пусковых сопротивлений в цепи параллельно соединенных тяговых двигателей. На 16-й позиции все пусковые сопротивления отключены. Силовая схема позволяет использовать реостатное торможение. В режиме реостатного торможения тяговые двигатели включаются параллельно и свою электрическую энергию отдают пускотормозным сопротивлениям, а также соленоиду на прицепном вагоне. При переводе вала контроллера с 1-й тормозной позиции до 12-й осуществляется постепенное уменьшение величины включенных тормозных сопротивлений. В тормозном режиме шунтовые обмотки двигателей включены все время. Они усиливают магнитное поле. |
| © eltroll2 2019-2021 |